Introduction
Truck-trailer systems are widely used in various industries for transporting goods. These systems have to function in dynamic warehouse environments and require accurate and efficient planning to ensure a safe operation. But, due to the nonlinear dynamics of the system, traditional motion planning methods may not be suitable for generating feasible paths in real- time. This project proposes the use of a sampling-based motion planning algorithm for a truck trailer system.
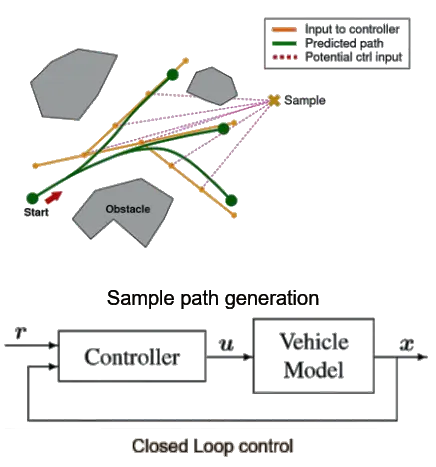
Closed Loop RRT (CL-RRT) is one such popular alogirthm that was first introduced for team MIT’s entry vehicle for the 2007 DARPA Urban Challenge, Talos. For the competition, their team needed to develop an algorithm that was efficient, real-time and could dynamically re-plan with changing obstacles in the environment.