Introduction
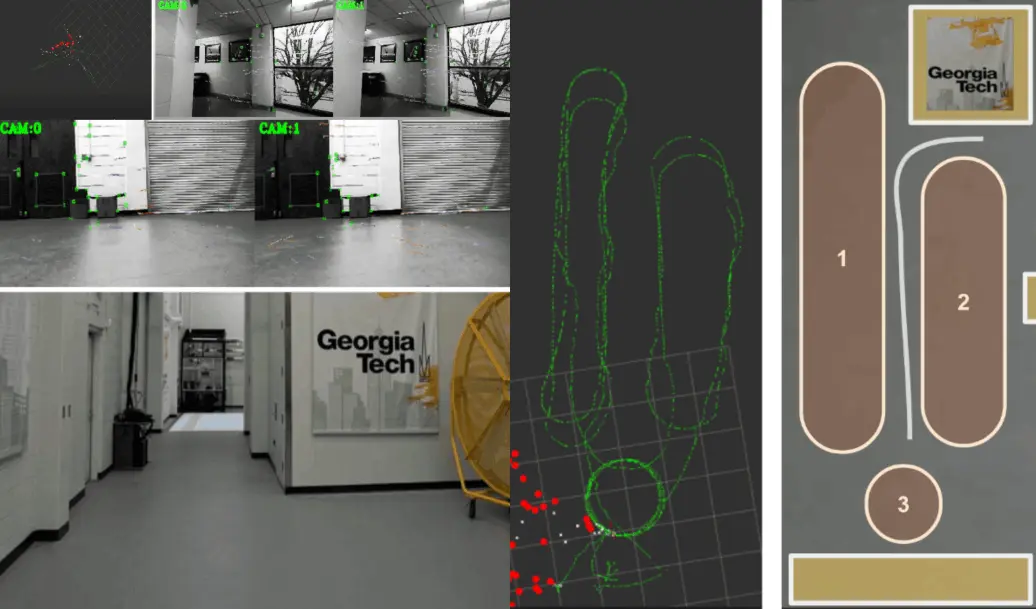
The AutoRally platform stands as an advanced testbed designed for cutting-edge research in self-driving vehicles. AutoRally provides an opportunity for researchers and enthusiasts to explore aggressive autonomous off-road driving. This project is my capstone project done under Dr. Tsiotras' guidance at Georgia Tech's DCSL lab.
The core of the project revolves around implementing a localization system for the vehicle that relies on cameras and IMU. Traditional global navigation satellite systems (GNSS) based methods suffer from signal interference in noisy signal environments. Also, they suffer from signal blockage in indoor or other GNSS denied areas which makes them unreliable in such environments.