Work Done
The development of this RRT and PRM Path Planner project involved a comprehensive process, building each component from the ground up. The journey began with the creation of fundamental classes for the search tree, allowing the algorithm to efficiently explore and store potential paths. The process of adding nodes to the tree was carefully implemented with lots of debugging involved, ensuring that the exploration process was accurate.
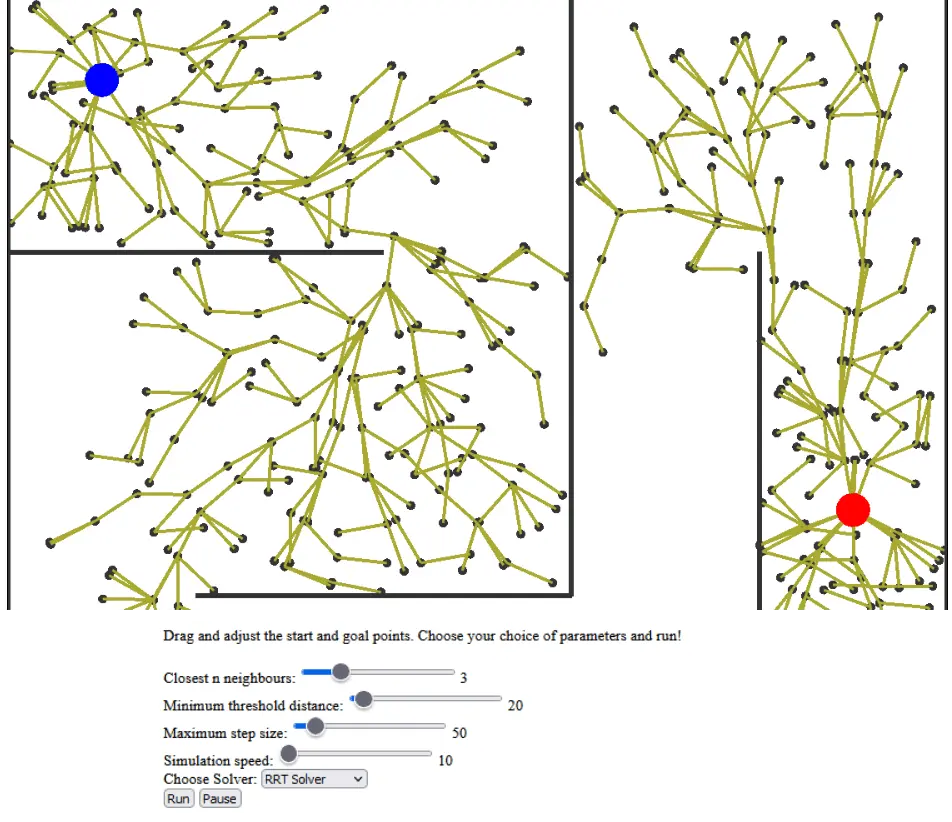
A crucial aspect of the project involved designing a heuristic function to guide the algorithm's decision-making process. Moreover, the user interface was designed to be intuitive and interactive. Users can seamlessly drag start and end points, tweaking parameters like the number of closest neighbors, minimum threshold distance, and maximum step size. This interactive approach ensures that users can witness firsthand how alterations in these parameters impact the path-finding process.