Work Done
Considering this to be the team's inaugural year, a decision was made to compromise on controller performance by employing a simpler bicycle model to represent the vehicle dynamics, rather than a more intricate model such as Ackermann steering models. This approach facilitated simplified calculations and expedited the establishment of a foundational framework. The controller necessitated three outputs, enabling control over brakes, acceleration and steering. Work was done on the following:
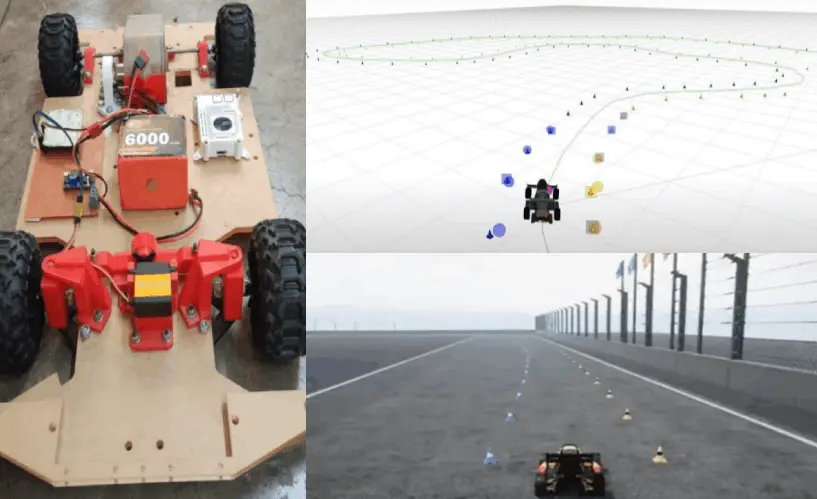
1. DC servo motor for steering, Linear Actuator for pedals
2. PID for longitudinal control
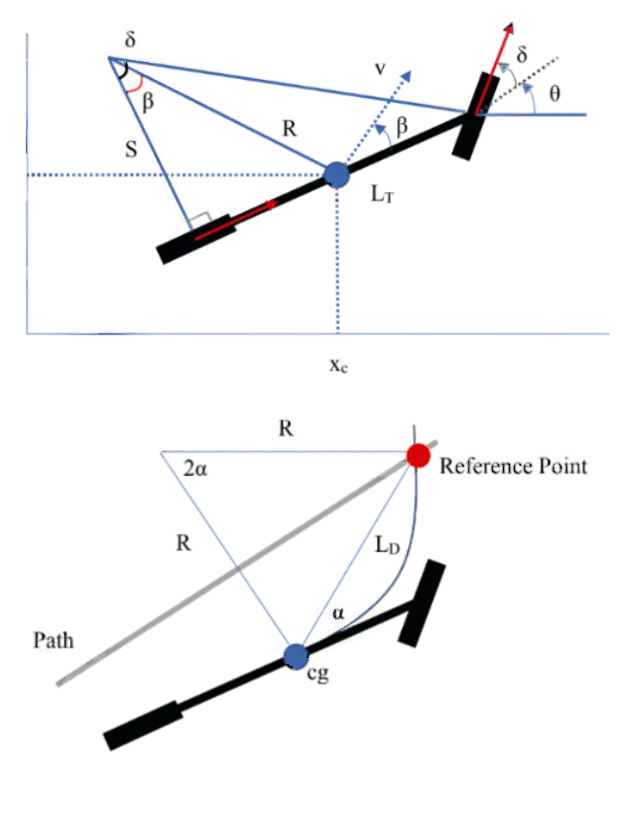
3. Pure Pursuit for lateral control
The team opted to employ a simple but reliable controller design, incorporating a Proportional-Integral-Derivative (PID) controller for longitudinal control. We tried pure pursuit and Stanley controller for lateral control of the vehicle but found pure-pursuit to be slightly better. All of the control algorithms were written in python from scratch. The controllers were tested with ROS based FSSim and FSDS simulators obtained from the formula student community. The PID parameters were tuned on a center-line of the competition track.