Introduction
Fuzzy Logic Controllers (FLC) are a good way to define a heuristic based control algorithm that is simple and robust across a wide range of operation. Compared to traditional controllers like that of PID controllers which cannot handle non linear responses properly, FLC have no issues with non linearity. These are also easier to make and tune and require some basic computation in order to set the control rules.
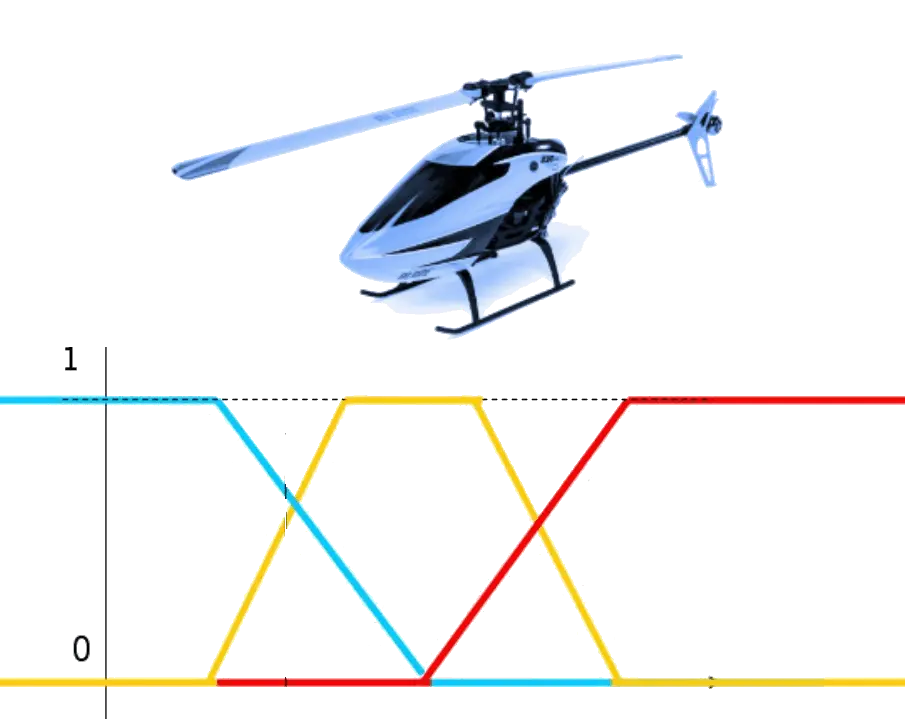
Compared to traditional boolean logic which has either true or false values, fuzzy logic operates on multiple ranges of descriptive qualities to model a system. These are modeled as a distribution functions. The values in these might vary based on different parameters in the system.